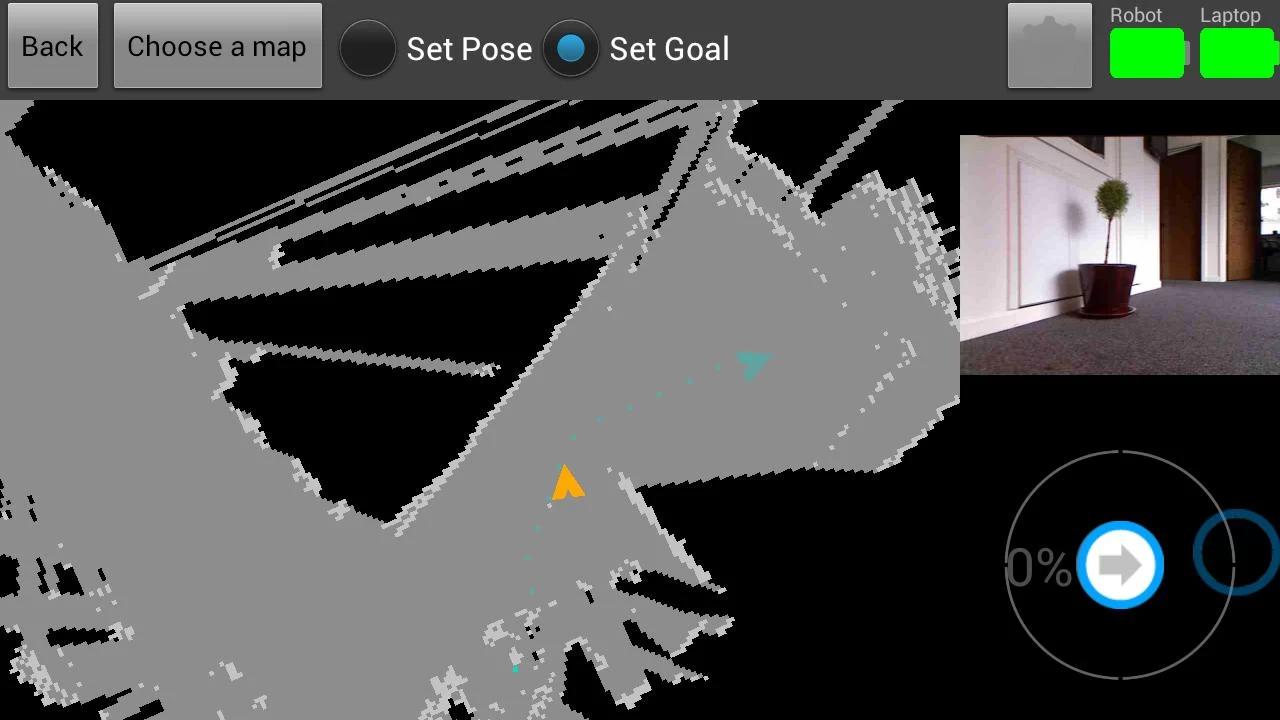
Use a map to navigate with your ROS-enabled robot.
There are 2 basic operations:
- Set Pose: allows you to change the estimated pose of the robot.
- Set Goal: allows you to send the robot somewhere in the map.
Wiki available here:
http://www.ros.org/wiki/android_map_nav
Source code:
https://github.com/rosjava/android_apps
Issue tracker:
https://github.com/rosjava/android_apps/issues
Phiên bản mới nhất
1.0Được tải lên bởi
Mahdy Almousa
Yêu cầu Android
Android 3.2+
Danh mục
Miễn phí Công cụ ỨNG DỤNGXếp hạng nội dung
Unrated · Warning – content has not yet been rated. Unrated apps may potentially contain content appropriate for mature audiences only.
Báo cáo
Gắn cờ là không phù hợpLast updated on Sep 14, 2015
Minor bug fixes and improvements. Install or update to the newest version to check it out!

APKPure - Kho ứng dụng đa nền tảng chủ yếu tập trung vào Android, cung cấp nội dung phong phú về ứng dụng. Khám phá ứng dụng bạn muốn dễ dàng, nhanh chóng và an toàn hơn, với tính năng tải xuống và cài đặt nhanh chóng và hiệu quả.





