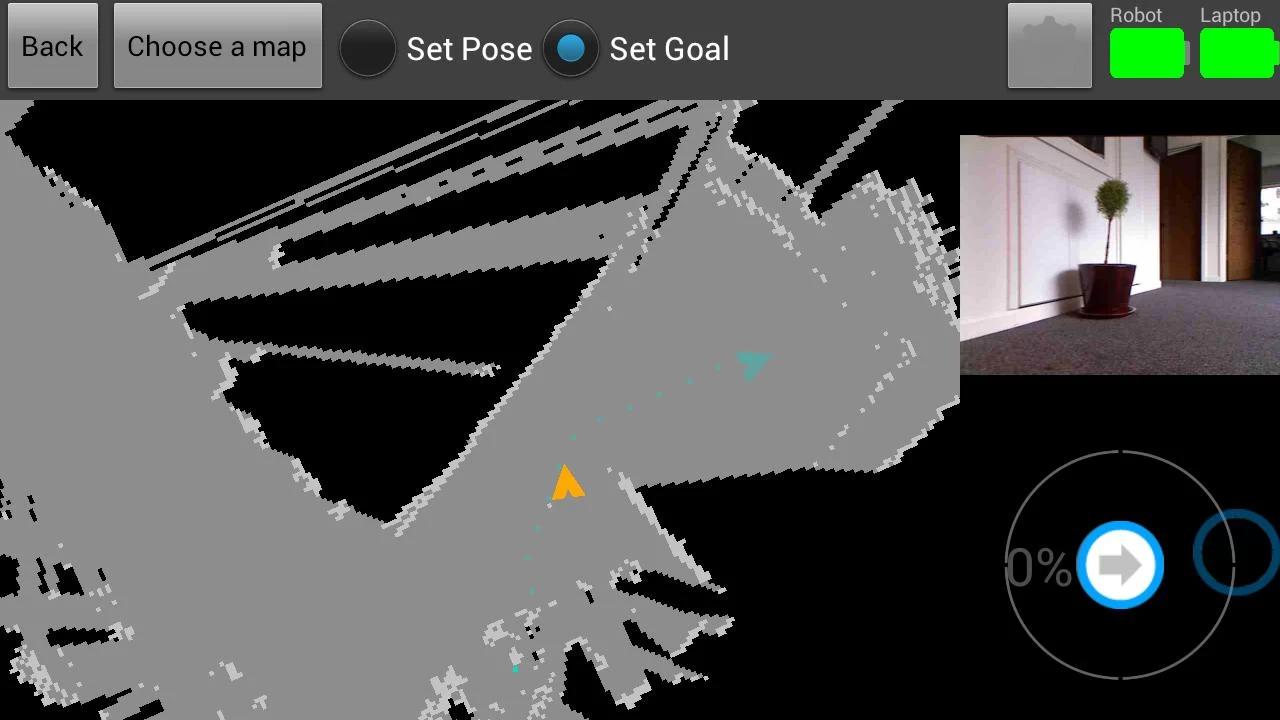
Use a map to navigate with your ROS-enabled robot.
There are 2 basic operations:
- Set Pose: allows you to change the estimated pose of the robot.
- Set Goal: allows you to send the robot somewhere in the map.
Wiki available here:
http://www.ros.org/wiki/android_map_nav
Source code:
https://github.com/rosjava/android_apps
Issue tracker:
https://github.com/rosjava/android_apps/issues
Dernière version
1.0Telechargé par
Mahdy Almousa
Nécessite Android
Android 3.2+
Catégories
Gratuit Outils APPLICATIONClassification du contenu
Unrated · Warning – content has not yet been rated. Unrated apps may potentially contain content appropriate for mature audiences only.
Signaler
Signaler comme inappropriéLast updated on Sep 14, 2015
Minor bug fixes and improvements. Install or update to the newest version to check it out!

APKPure - Une boutique d'applications multi-plateforme principalement axée sur Android, offrant un vaste contenu lié aux applications. Découvrez l'application que vous souhaitez plus facilement, plus rapidement et en toute sécurité, avec des téléchargements et des installations rapides et efficaces.





