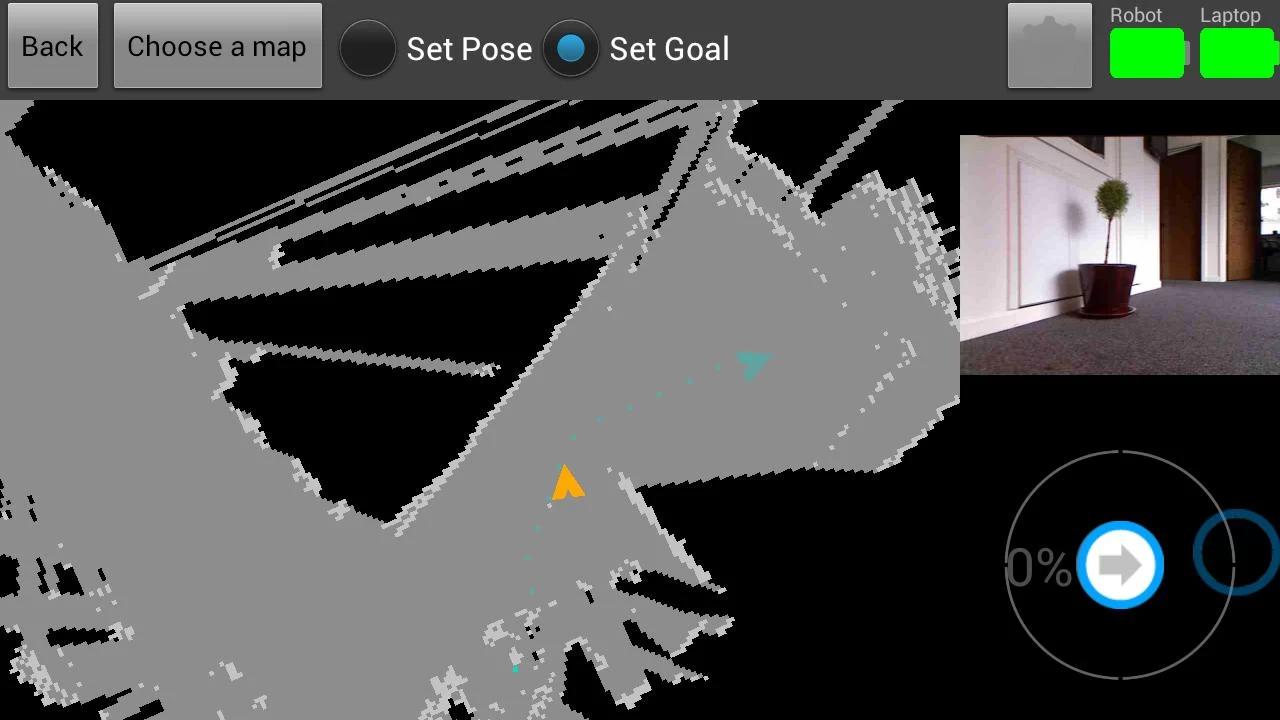
Use a map to navigate with your ROS-enabled robot.
There are 2 basic operations:
- Set Pose: allows you to change the estimated pose of the robot.
- Set Goal: allows you to send the robot somewhere in the map.
Wiki available here:
http://www.ros.org/wiki/android_map_nav
Source code:
https://github.com/rosjava/android_apps
Issue tracker:
https://github.com/rosjava/android_apps/issues
Последняя версия
1.0Загрузил
Mahdy Almousa
Требуемая версия Android
Android 3.2+
Категория
Бесплатно Инструменты ПриложениеВозрастные ограничения
Unrated · Warning – content has not yet been rated. Unrated apps may potentially contain content appropriate for mature audiences only.
Жаловаться
Сообщить о неприемлемом содержанииLast updated on 14/09/2015
Minor bug fixes and improvements. Install or update to the newest version to check it out!

APKPure - Мультиплатформенный магазин приложений, в основном ориентированный на Android, предоставляющий обширный контент, связанный с приложениями. Находите нужные приложения проще, быстрее и безопаснее, с быстрой и эффективной загрузкой и установкой.





