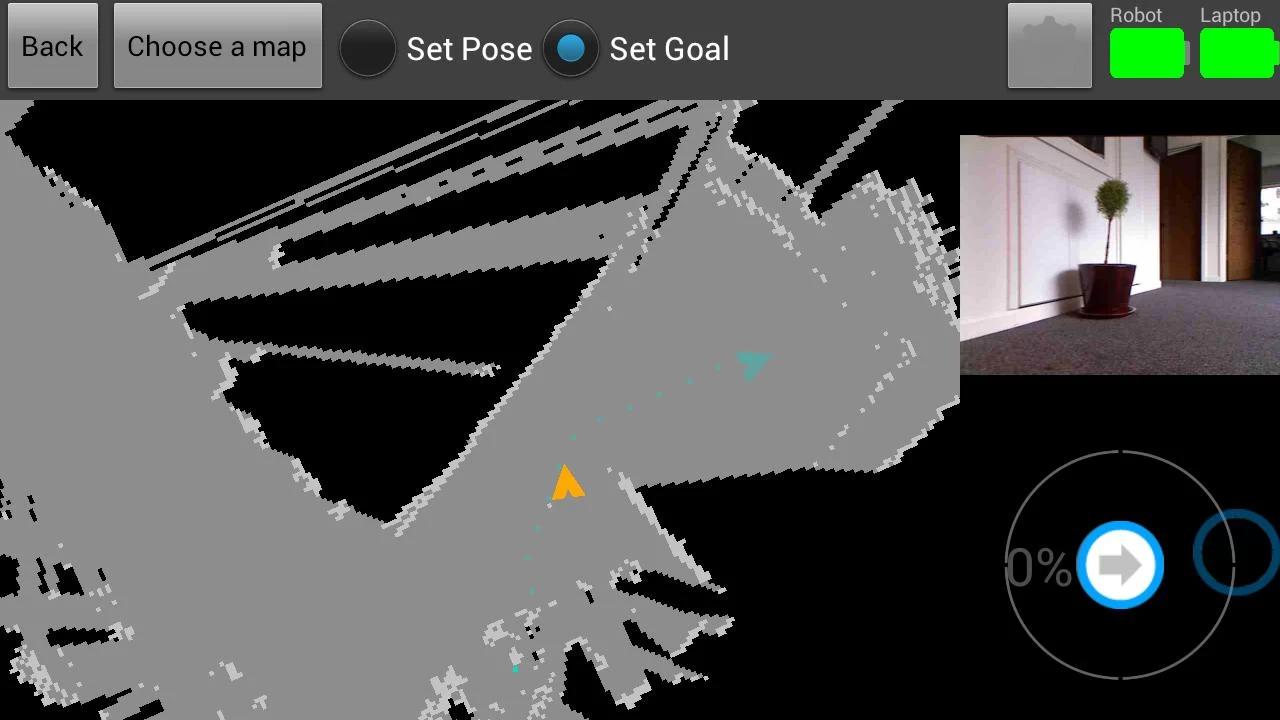
Use a map to navigate with your ROS-enabled robot.
There are 2 basic operations:
- Set Pose: allows you to change the estimated pose of the robot.
- Set Goal: allows you to send the robot somewhere in the map.
Wiki available here:
http://www.ros.org/wiki/android_map_nav
Source code:
https://github.com/rosjava/android_apps
Issue tracker:
https://github.com/rosjava/android_apps/issues
Laatste Versie
1.0Geüpload door
Mahdy Almousa
Android vereist
Android 3.2+
Categorie
Gratis Tools APPInhoudsbeoordeling
Unrated · Warning – content has not yet been rated. Unrated apps may potentially contain content appropriate for mature audiences only.
Melden
Rapporteer als ongepastLast updated on Sep 14, 2015
Minor bug fixes and improvements. Install or update to the newest version to check it out!

APKPure - Een multi-platform appstore die zich voornamelijk richt op Android en uitgebreide app-gerelateerde content biedt. Ontdek de app die je wilt, eenvoudiger, sneller en veiliger, met snelle en efficiënte downloads en installaties.





