ไม่มีกิจกรรมอีกต่อไป
การควบคุมระยะไกลคำสั่งและแสดงข้อมูลเซ็นเซอร์แบบเรียลไทม์จากหุ่นยนต์เคลื่อนที่ที่ทำงานบนระบบปฏิบัติการหุ่นยนต์ (ROS) โดยใช้การควบคุม ROS
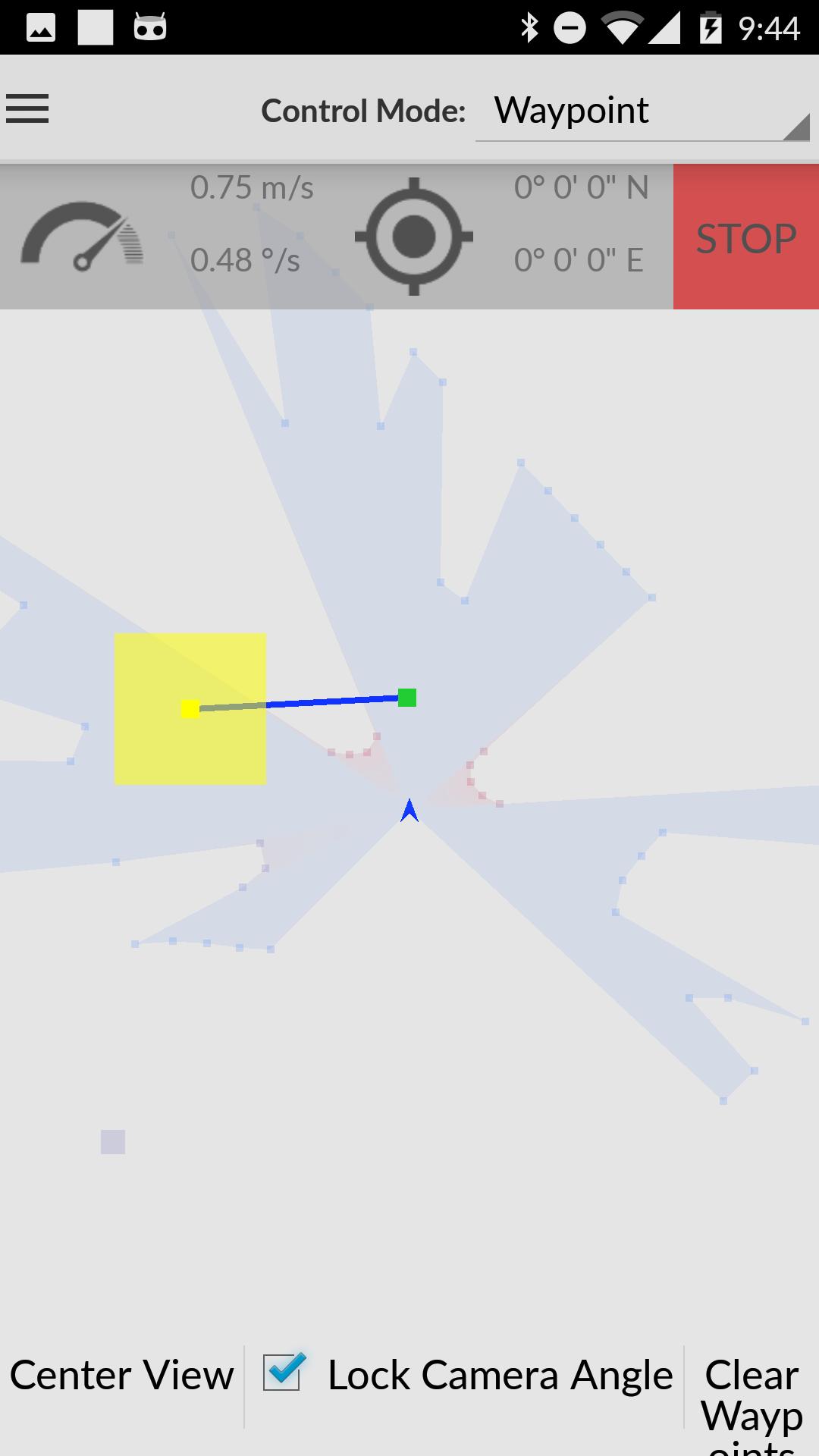
คุณสมบัติ:
- ตัวเลือกการควบคุม teleoperation หลายตัวรวมถึงจอยสติ๊กและการควบคุมการเอียง
- การวางแผน Waypoint และการนำทาง
- มุมมองกล้องระยะไกล
- การสร้างภาพเลเซอร์สแกน
- ข้อมูล GPS และมุมมองแผนที่
- การตั้งค่าการเชื่อมต่อที่สามารถกำหนดค่าได้เพื่อความเข้ากันได้สูงสุดระหว่างหุ่นยนต์
สำหรับนักพัฒนา:
รู้สึกมีส่วนร่วมในแอพนี้!
รหัสแหล่งที่มา:
https://github.com/mtbii/RobotCA
เวอร์ชันล่าสุด
1.0อัปโหลดโดย
Bunglon New
ต้องใช้ Android
Android 4.0.3+
Category
ฟรี เครื่องมือ แอปการจัดประเภทเนื้อหา
Everyone
รายงาน
ปักธงว่าไม่เหมาะสมLast updated on Jul 9, 2016
Minor bug fixes and improvements. Install or update to the newest version to check it out!







APKPure - ร้านค้าแอปพลิเคชันแบบมัลติแพลตฟอร์มที่มุ่งเน้นระบบ Android เป็นหลัก พร้อมให้บริการเนื้อหาที่เกี่ยวกับแอปอย่างครบครัน ค้นพบแอปที่คุณต้องการได้ง่าย รวดเร็ว และปลอดภัยยิ่งขึ้น พร้อมการดาวน์โหลดและติดตั้งที่รวดเร็วและมีประสิทธิภาพ





