下载 APKPure App
可在安卓获取Arduino Car Control的历史版本
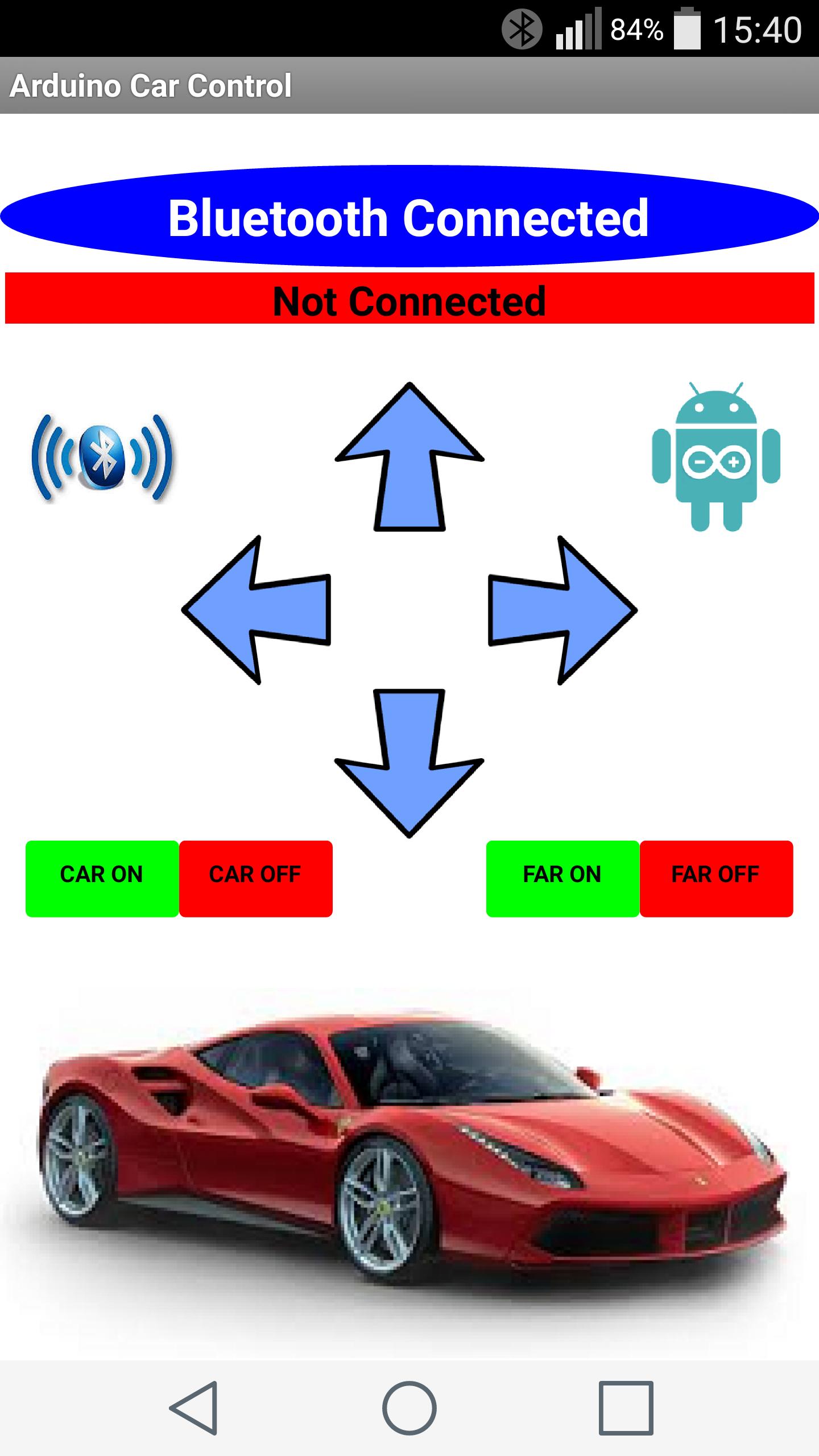
Arduino的汽车控制
Arduino circuit check your car from your phone with bluetooth communication .
Arduino bluetooth haberleşmesi ile telefonunuzdan araba devrelerinizi kontrol edin.
ahmetalberen@gmail.co for questions You can send mail .
Sorularınız için ahmetalberen@gmail.com mail atabilirsiniz.
/*
HAZIRLAYAN = Ahmet ALBEREN
ahmetalberen@gmail.co for questions You can send mail .
*/
#include
SoftwareSerial BT(2,3); //rx-tx
int Car1= 5;
int Car2= 6;
int motorlc = 8; // left motor clockwise rotation
int motorla = 9; // left motor anticlockwise rotation
int motorrc = 10; // right motor clockwise rotation
int motorra = 11; // right motor anticlockwise rotatio
int Far = 13;
int hiz1;
int hiz2;
int hiz3;
String readString;
void setup() { // presenting pins as outputs
pinMode(Far, OUTPUT);
pinMode(motorlc, OUTPUT);
pinMode(motorla, OUTPUT);
pinMode(motorrc, OUTPUT);
pinMode(motorra, OUTPUT);
Serial.begin(9600);
BT.begin(9600);
}
void loop() {
while(BT.available()){ // the code here is for bluetooth
delay(3);
char c = BT.read();
readString += c;
}
if(readString.length() > 0){ // when a certain button is pressed the reaction will be...
Serial.println(readString);
if(readString == "Forward"){
analogWrite (Car1,hiz1);
analogWrite (Car2,hiz1);
digitalWrite(motorlc, HIGH);
digitalWrite(motorla, LOW);
digitalWrite(motorrc, HIGH);
digitalWrite(motorra, LOW);
}
if(readString == "Back"){
analogWrite (Car1,hiz1);
analogWrite (Car2,hiz1);
digitalWrite(motorlc, LOW);
digitalWrite(motorla, HIGH);
digitalWrite(motorrc, LOW);
digitalWrite(motorra, HIGH);
}
if(readString == "Left"){
analogWrite (Car1,hiz2);
analogWrite (Car2,hiz2);
digitalWrite(motorlc, HIGH);
digitalWrite(motorla, LOW);
digitalWrite(motorrc, LOW);
digitalWrite(motorra, HIGH);
}
if(readString == "Right"){
analogWrite (Car1,hiz2);
analogWrite (Car2,hiz2);
digitalWrite(motorlc, LOW);
digitalWrite(motorla, HIGH);
digitalWrite(motorrc, HIGH);
digitalWrite(motorra, LOW);
}
if(readString == "Stop"){
digitalWrite(motorlc, LOW);
digitalWrite(motorla, LOW);
digitalWrite(motorrc, LOW);
digitalWrite(motorra, LOW);
analogWrite (Car1,hiz3);
analogWrite (Car2,hiz3);
}
if(readString == "Car on"){
hiz1 =200;
hiz2 =140;
hiz3 =0;
digitalWrite(Far,HIGH);
delay(50);
digitalWrite(Far,LOW);
delay(50);
digitalWrite(Far,HIGH);
delay(50);
digitalWrite(Far,LOW);
delay(50);
digitalWrite(Far,HIGH);
delay(50);
digitalWrite(Far,LOW);
}
if(readString == "Car off"){
hiz1 =0;
hiz2 =0;
hiz3 =0;
}
if(readString == "Far on"){
digitalWrite(Far,HIGH);
}
if(readString == "Far off"){
digitalWrite(Far, LOW);
}
}
readString="";
}
Last updated on 2016年05月03日
Minor bug fixes and improvements. Install or update to the newest version to check it out!







")
Arduino Car Control
1.0 by Ahmet ALBEREN
2016年05月03日